The goal of this lab was to learn how to perform relative and absolute QA/QC, along with doing manual QA/QC on classification.
METHODS
LP360 and the LP360 extension in ArcMap was used for this data processing. First, point cloud density was checked by creating a map that showed low density areas. According to this, point density was acceptable throughout the study area.
Next, relative accuracy was assessed. A map was created that displayed differences in elevation. This was used for swath-to-swath analysis. For this analysis, seamlines were created along flat, unobstructed areas within the overlap lines.
Next, absolute accuracy was assessed. This was done for both vertical and horizontal accuracy. Checkpoint locations for each were imported from a spreadsheet. Vertical checkpoints were referenced for measured values vs. values from the LiDAR data. Horizontal checkpoints were displayed on the map and refenced with the LiDAR data.
Manual QA/QC of classification errors involved looking through the study area and flagging classification errors. Once this was done, these errors were rectified using manual classification tools such as classifying in the profile window.
RESULTS
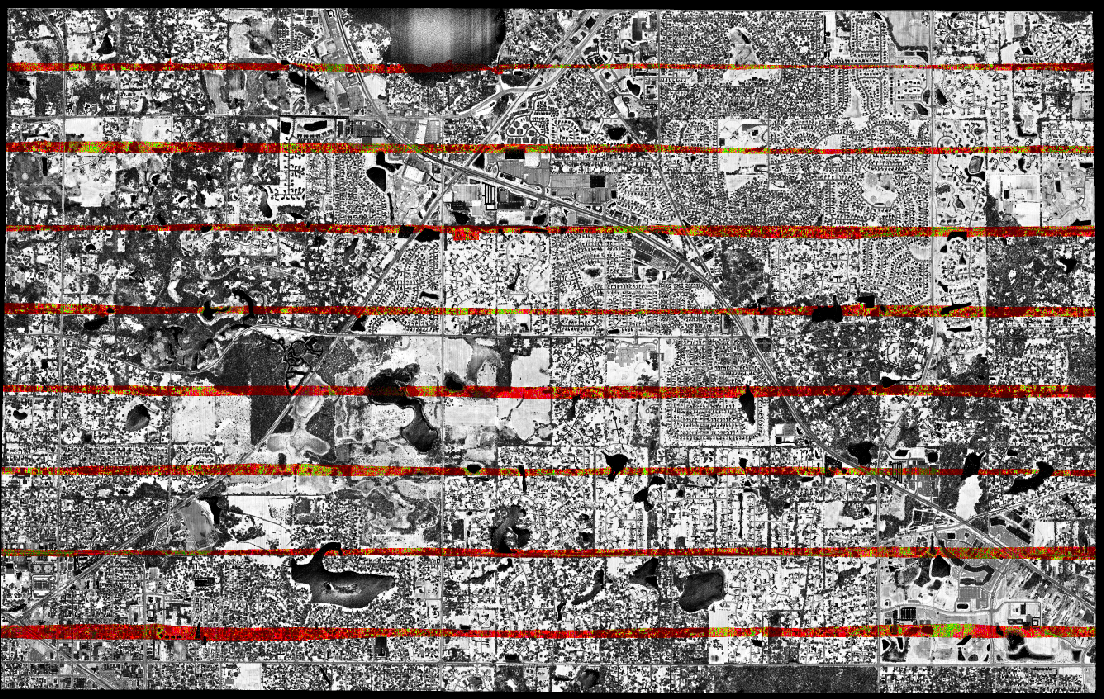
The map created in relative accuracy assessment showing differences in elevation is shown below. The horizontal lines are overlap of flight lines. The results from swath-to-swath analysis showed few areas above the maximum height value.
Manual QA/QC was done through much of the data, an example of this is shown below. The error was first flagged, as shown in the first image, then rectified, as shown in the second. The flag was removed after fixing the error.


SOURCES
Data obtained from Cyril Wilson for use in 358 LiDAR course.





